Yongqi Zhang*1, Biao Xie*1, Haikun Huang1, Elisa Ogawa1, Tongjian You1, Lap-Fai Yu2
1University of Massachusetts Boston 2George Mason University
*Equal contributors

Abstract
Player’s physical experience is a critical factor to consider in designing motion-based games that are played through motion sensor gaming consoles or virtual reality devices. However, adjusting the physical challenge involved in a motion-based game is difficult and tedious, as it is typically done manually by level designers on a trial-and-error basis. In this paper, we propose a novel approach for automatically synthesizing levels for motion-based games that can achieve desired physical movement goals. By formulating the level design problem as a trans-dimensional optimization problem which is solved by a reversible-jump Markov chain Monte Carlo technique, we show that our approach can automatically synthesize a variety of game levels, each carrying the desired physical movement properties. To demonstrate the generality of our approach, we synthesize game levels for two different types of motion-based games and conduct auser study to validate the effectiveness of our approach.
Index Terms Level design; optimization; exergaming; generative design
Video Preview
Publications
Pose-Guided Level Design
*Yongqi Zhang, *Biao Xie, Haikun Huang, Elisa Ogawa, Tongjian You, Lap-Fai Yu
*Equal contributors
Proceedings of the ACM Conference on Human Factors in Computing Systems (CHI 2019)
Honorable Mention Award
Paper,Video
BibTex
@inproceedings{level2,
author = “Yongqi Zhang and Biao Xie and Haikun Huang and Elisa Ogawa and Tongjian You and Lap-Fai Yu”,
title = “Pose-Guided Level Design”,
booktitle = “Proceedings of the 37th Annual ACM Conference on Human Factors in Computing Systems”,
year = “2019”
}
Acknowledgments
This Research is supported by the Oracle Undergraduate Fellowship, the McNair Program and the National Science Foundation under award number 1565978
Synthesized Levels
Five levels synthesized with different movement goals for our demo game Just Exercise.
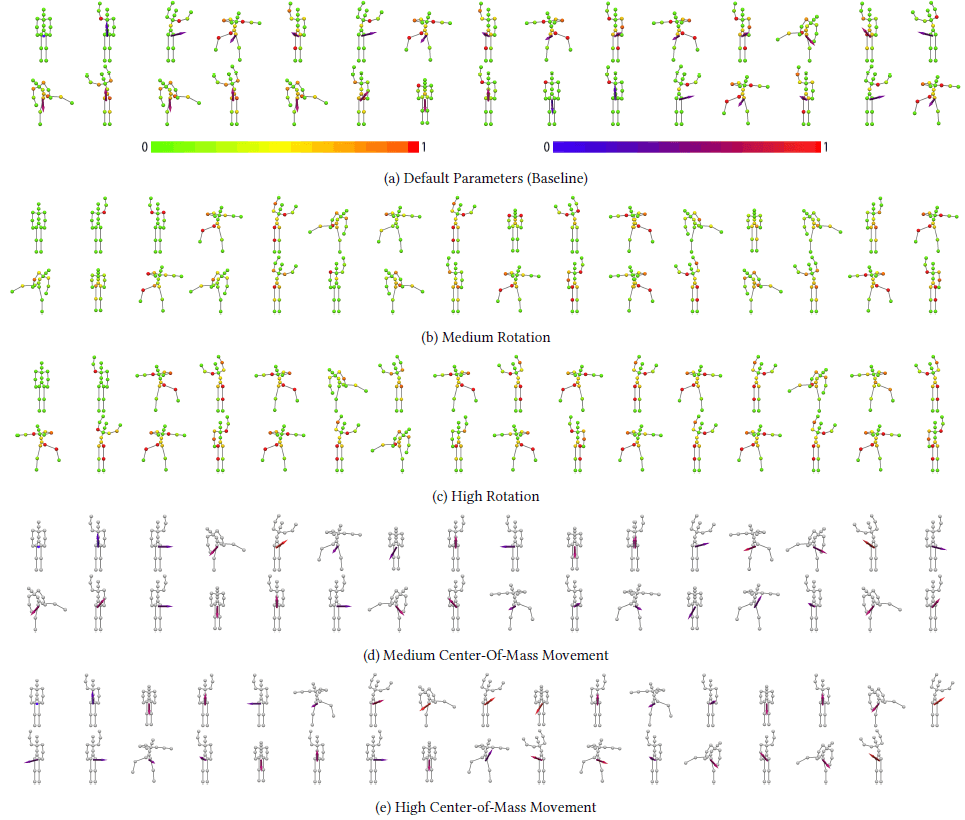
Levels synthesized with different movement goals for Just Exercise. (a) shows the levels synthesized with the default parameters. (b) and (c) show the levels synthesized with a medium and a high joint rotation target respectively. For each pose, the joints’ colors correspond to the amount of rotation in transitioning from the previous pose to the current pose. Red corresponds to high rotation. (d) and (e) show the levels synthesized with a medium and high center-of-mass movement target respectively. For each pose, an arrow is shown whose direction and color denote the direction and magnitude of the center-of-mass translation from the previous pose to the current pose. Red corresponds to high magnitude